










Autonomous Robots and Trust

- Our hallway testing environment.
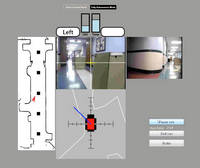
- The user interface for driving JR.
Research in the field of human-automation interaction (HAI) has shown that trust is a key factor that influences an operator's interaction with an autonomous system. Researchers also found that proper calibration of trust is critical to safe operation of an autonomous system. Too much trust on the system can lead to abuse of automation and conversely too little trust can lead to disuse of automation. In dynamic systems, operators need a control allocation strategy that optimizes performance. Hence mis-calibrated trust can lead to inefficient operation or even catastrophic failures.
As autonomous robots become commonplace, it is important to ensure that robot operators do not misuse autonomous behaviors due to mis-calibrated trust. Since, the field of human-robot interaction (HRI) is significantly more complex and different (poor situation awareness, unstructured dynamic operating environment, communication delays, etc) compared to HAI platforms, trust models specific to HRI need to be developed. We are investigating factors that influence an operator's trust of robots in an attempt to create a model of trust for HRI. Based on the HRI trust model we will create a set of design guidelines to ensure good trust calibration to improve overall performance and prevent avoidable accidents.
Related Papers
Munjal Desai, Mikhail Medvedev, Marynel Vázquez, Sean McSheehy, Sofia Gadea-Omelchenko, Christian Bruggeman, Aaron Steinfeld, and Holly Yanco. Effects of Changing Reliability on Trust of Robot Systems. In Proceedings of the 7th Annual ACM/IEEE International Conference on Human-Robot Interaction, Boston, Massachusetts, March 2012.
Poornima Kaniarasu, Aaron Steinfeld, Munjal Desai, and Holly A. Yanco. Potential Measures for Detecting Trust Changes. Late Breaking Report, in Proceedings of the 7th Annual ACM/IEEE International Conference on Human-Robot Interaction, Boston, Massachusetts, March 2012.
Munjal Desai, Kristen Stubbs, Aaron Steinfeld, and Holly Yanco. Creating Trustworthy Robots: Lessons and Inspirations from Automated Systems. Proceedings of the AISB Convention: New Frontiers in Human-Robot Interaction, 2009.
Munjal Desai, Jill L. Drury, and Holly Yanco. Initial User Reactions to Robot Interfaces with Sliding Scale Autonomy and Trust Scales. Poster presentation at the 3rd ACM/IEEE International Conference on Human-Robot Interaction, Amsterdam, March 2008.